Completed two distinct projects in simulation: developing state estimation algorithms for an aerial drone and optimizing navigation stacks for a ground robot in complex environments.
Autonomous Robotics: Drone & Ground Systems
Objective
Key Contributions
- Drone State Estimation (C++): Implemented the behavior controller node and programmed an Extended Kalman Filter (EKF) from scratch to fuse IMU, magnetometer, GPS, and sonar data, enabling precise 3D localization.
- Robot Navigation (ROS 2): Tuned path planning algorithms (A*, Theta*) and costmap parameters to ensure collision-free navigation in tight corridors.
- Trajectory Control: Optimized the Regulated Pure Pursuit controller settings to eliminate oscillations, ensuring smooth path tracking for the ground vehicle.
Visuals
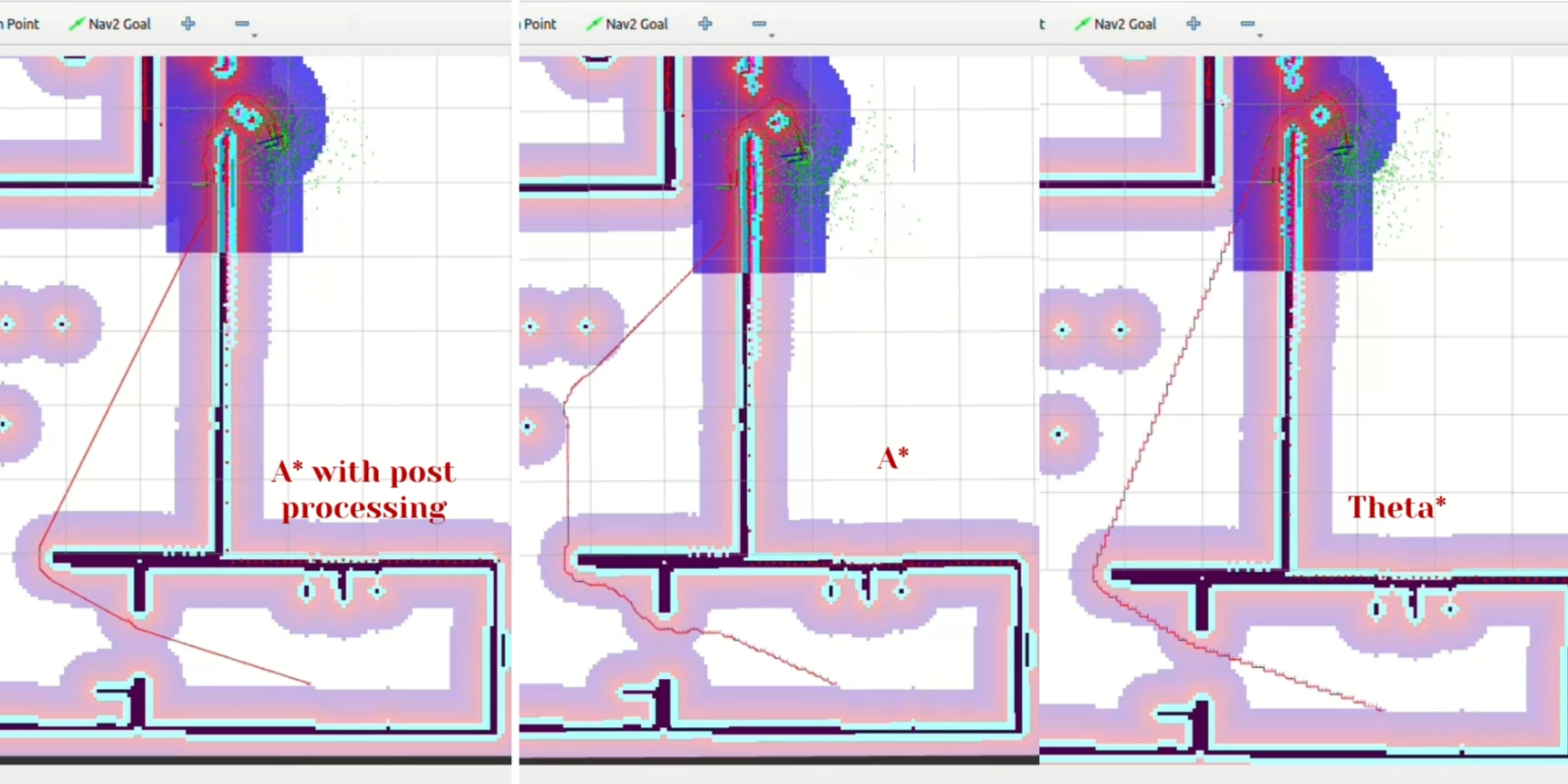 Fig 1. Path Planning Algorithm Comparison
Fig 1. Path Planning Algorithm Comparison
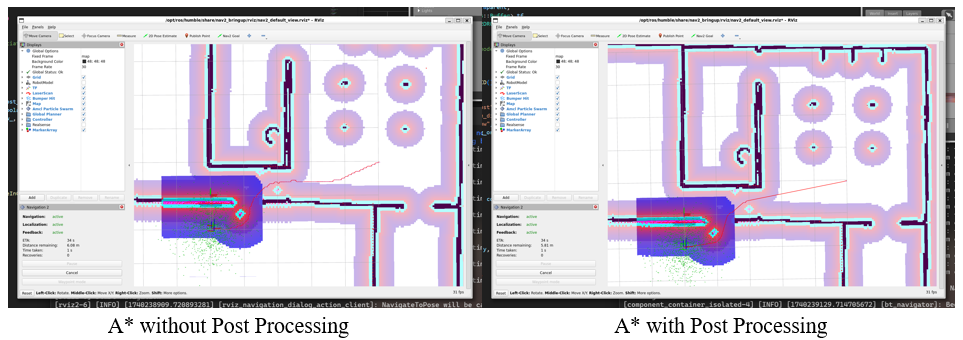 Fig 2. A* Path Smoothing Analysis
Fig 2. A* Path Smoothing Analysis
Fig 1. Path Planning Algorithm Comparison
Fig 2. A* Path Smoothing Analysis